Phân loại các khâu
Một phần tử có tính chất động học nhất định gọi là khâu. Vậy khâu động học là một phần tử của hệ thống tự động (HTTĐ) mà có một đặc tính động nào đó.
Ví dụ:
1- Xét mạch điện có phương trình động:
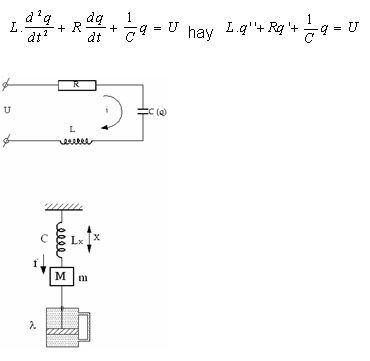
2- Xét một hệ cơ khí như hình vẽ:
Khi đặt một tác động f vào vật M thì hệ có phương trình động viết dưới dạng vi phân:

X - độ chuyển dịch vật M khối lượng m
λ - hệ số lực giảm chấn
C - hệ số đặc trưng độ cứng của lò xo Lx
Hay:
Vậy xét về tính chất động học 2 hệ trên cùng loại vậy chúng là một khâu cùng loại và chúng ta chỉ xét mặt biến đổi của hệ chứ không cần biết đó là loại hệ gì. Với mỗi khâu ta có thể ký hiệu bằng sơ đồ thuật toán như sau:

X (t) - Tín hiệu vào của khâu là tất cả những yếu tố tác dụng lên khâu làm trạng thái của khâu thay đổi.
Y (t) - Tín hiệu ra của khâu là thông số đặc trưng cho sự thay đổi trạng thái của khâu.
Dựa vào đặc điểm phương trình của các khâu động học mà chúng ta có thể phân khâu thành các loại:
- Khâu nguyên hàm (khâu tỷ lệ hay còn gọi là khâu khuếch đại).
- Khâu vi phân (khâu quán tính bậc1, ở điều kiện ổn định lượng ra tỷ lệ với
lượng vào).
- Khâu tích phân (lượng ra tỷ lệ với tích phân lượng vào).
- Khâu hỗn hợp.
Các đặc tính động của các khâu trong hệ thống tự động
Phương trình vi phân
Xét khâu đối tượng như chương 3 đã nghiên cứu, nếu ta qui định vế trái là những gì thuộc thông số ra của khâu còn vế phải là những gì thuộc về nhiễu hay thông số vào, thì phương trình vi phân của khâu có thể viết dưới dạng sau:
* Dạng viết thông thường:
hay
* Dạng toán tử: nếu sử dụng toán tử vi phân
Ví dụ : Ġ(toán tử vi phân)
hay (1)
( φ là hàm của biến số thực thời gian t )
* Dạng thuật toán: sử dụng phép biến đổi Laplace

Trở lại áp dụng cho khâu đối tượng ta có (giả sử điều kiện không ban đầu thỏa mãn).
⇒ To .P . φ (P) + A. φ (P) = μ (P) - λ (P)
⇒ ( To .P + A ) φ (P) = μ (P) - λ (P) (2)
(2) là dạng thuật toán của phương trình trên.
(2) và (1) giống nhau về hình thức nhưng một bên là hàm thực 1 bên là hàm phức.
Kết luận: Dựa vào phương trình (1) ta có thể suy ra cách viết (2) bằng cách thay biến thực t bằng biến phức P.
Các đặc tính thời gian
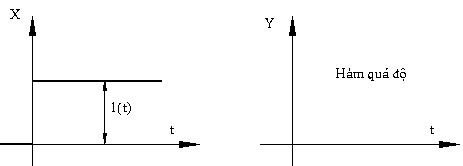
Hàm quá độ
Đây là phản ứng của khâu với nhiễu động đột biến dạng bậc thang đơn vị

Lúc đó thông số ra thay đổi theo một đường cong nào đó và gọi là hàm quá độ của khâu.
Ví dụ: Khâu đối tượng.
Từ phương trình vi phân của khâu To. φ’ + A φ = μ - λ

Hàm quá độ xung
Đây là phản ứng của khâu ứng với nhiễu động đột biến dạng xung đơn vị (xung dạng chữ nhật). Về mặt hình thức có thể phân tích xung chữ nhật thành tổng 2 xung bậc thang trái dấu và lệch nhau 1 khoảng bằng độ rộng hình chữ nhật.
Ví dụ : Khâu đối tượng To. φ’ + A φ = μ - λ

Từ hàm quá độ ta suy ra hàm xung là tổng hợp của hai nhiễu X1 , X2
Hàm số truyền
Giả sử có một khâu mà tính chất động của nó được miêu tả bằng phương trình bậc hai dạng: a2 y’’ + a1 y’ + ao y = b1 x’ + bo x
Với điều kiện ban đầu bằng 0 ta viết phương trình trên dưới dạng Laplace:

Hàm số truyền của các khâu mắc nối tiếp
Giả sử có n khâu mắc nối tiếp, đầu ra của khâu này là đầu vào khâu kia:

Nếu gọi hàm số truyền của cụm khâu là W(P)

Hàm số truyền của các khâu mắc song song
Giả sử có n khâu mắc song song với nhau và có các hàm số truyền đã biết trước như hv.

Gọi hàm truyền chung của hệ thống là W(P)

Vậy hàm số truyền của các khâu mắc song W(P) = Wi
Hàm số truyền của các khâu mắc ngược
Giả sử có hai khâu W(P)1 và W(P)2 mắc ngược nhau như hình vẽ:


Đặc tính tần sô
Trong thực tế có thể đưa nhiễu đầu vào có dạng hình sin hay cosin với tần số ω
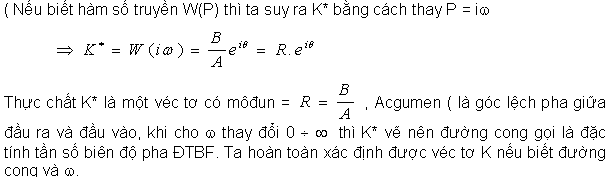
⇒ Các đặc tính khi nhiễu đầu vào là hàm điều hòa có tần số thay đổi gọi là đặc tính tần số.

K* còn gọi là hệ số khuếch đại phức hay hàm số truyền phức.
Vậy ta tìm cách biểu diễn K* thành hàm số truyền.
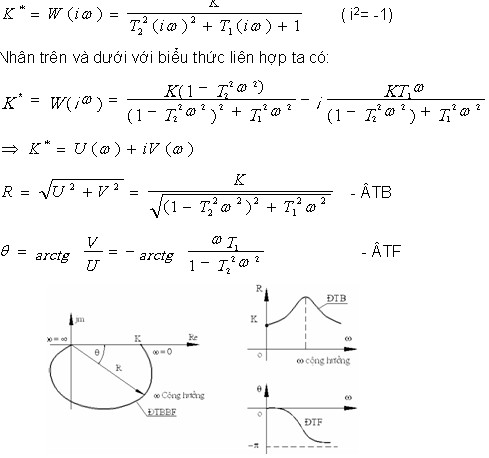
Ví dụ: Giả sử ta có một khâu mà tính chất động được mô tả bằng hàm vi phân bậc ba có dạng:

So sánh (3) và (5) ta thấy hình thức chúng giống nhau chỉ khác một bên là P còn 1 bên là iω

Về mặt toán học để chặt chẽ ta xét toàn dãi ω thay đổi -∞ ∞ thì ĐTBF đối xứng qua trục thực Re.
Mặt khác nếu lấy logarít 2 vế của biểu thức K*:
ln K* = ln W(iω) = ln R + iθ
⇒ ta có đặc tính tần số logarít:
ln R = f (lnω) → đặc tính biên độ logarít
θ = f (lnω) → đặc tính pha logarít
Đặc tính pha mà ta xét trên là đặc tính pha bình thường, thường ta sử dụng ĐTBF này để tính toán sự ổn định cho trước. Trong trường hợp khi cần tính toán hệ thống theo độ tắt dần cho trước của quá trình quá độ ta sử dụng tần số biên độ pha mở rộng. ĐTBF mở rộng cũng giống trên nhưng chỉ khác là ta cho tần số đầu vào là ω và tắt dần (biên độ A thay đổi).

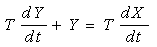
Ví dụ: Xét khâu đối tượng có 1 dung lượng cân bằng ta có:


Trong thực tế ta có thể thu được các đường đặc tính bằng thực nghiệm nhờ máy hiện sóng:


Các khâu tiêu biểu của HTTĐ và các đặc tính động của chúng
Ta biết rằng một hệ thống dù phức tạp đến đâu chúng cũng đều cấu tạo bằng một số khâu, các khâu đó gọi là các khâu tiêu biểu của hệ thống tự động
Thường những khâu chọn làm khâu tiêu biểu là khâu mà từ đó ta có thể tạo nên bất kỳ một khâu nào khác, thường chúng được mô tả bằng phương trinh vi phân bậc 1, 2
Sau đây là một số khâu tiêu biểu thường gặp trong hệ thống tự động :
Khâu tỷ lệ (khâu khuếch đại hay khâu không có quán tính)
Đó là khâu động học mà đại lượng ra tỷ lệ với đại lượng vào theo phương triình Y = K.X
Phương trình vi phân: Y = K.X(t)
Ví dụ:

Hàm quá độ:
X = 1(t)
Y = K



Các đường đặc tính khác:

Khâu quán tính bậc 1 (khâu phi chu kỳ bậc 1 hay khâu một dung lượng)
Là khâu động học mà khi đại lượng vào thay đổi theo xung bậc thang thì đại lượng ra thay đổi theo quy luật hàm mũ.
Phương trình động

Hàm quá độ

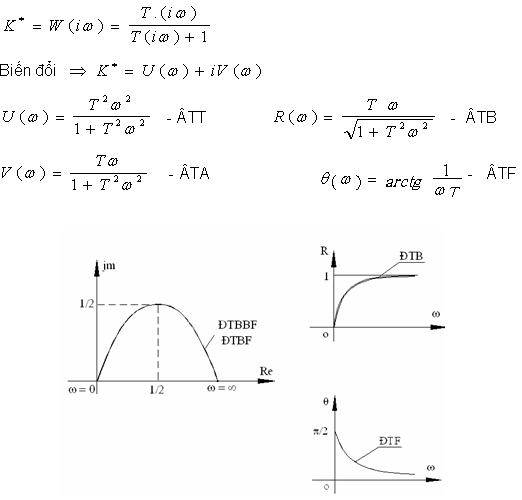
Hàm số truyền

Hàm số truyền phức

Trong sơ đồ cấu trúc của hệ thống, khâu quán tính bậc 1 được ký hiệu như sau:

Khâu dao động
Là khâu động học mà phương trình động của nó được biểu diễn dưới dạng phương trình vi phân bậc 2:

Phương trình vi phân:

Hàm quá độ của khâu:
Để tìm hàm quá độ của khâu ta giải phương trình vi phân trên với X = 1(t)



Đây là một hàm điều hòa và trong trường hợp này ta gọi khâu là khâu bảo thủ.
Vậy muốn có khâu dao động thì phải có điều kiện: T1 < 2T2
Hàm số truyền của khâu dao động:
Viết phương trình vi phân dưới dạng thuật toán ta coï:

Hàm số truyền phức:
Đặc điểm của ĐTB là có điểm cực đại, còn ĐTBF bắt đầu từ điểm (K, j0) trên trục thực và qua 2 góc phần tư thứ III và IV.
Khâu tích phân
Là khâu mà phương trình động của nó có dạng sau:
Phương trình:

Hàm quá độ:

Hàm số truyền:

Hàm số truyền phức:

Khâu vi phân
Là khâu động học mà phương trình động có dạng:

Trong thực tế không có mà có khâu vi phân thực và có dạng:

Phương trình vi phân:
Hàm quá độ:

Hàm số truyền: lấy ảnh 2 vế
Hàm số truyền phức:
Trong sơ đồ cấu trúc của hệ thống khâu tích phân được ký hiệu như sau:

Khâu chậm trễ
Là khâu mà tín hiệu ra lặp lại hoàn toàn so với tín hiệu vào nhưng chậm trễ 1 khoảng thời gian T
Ví dụ

Phương trình động:
Y(t) = X ( t -T )
Hàm quá độ:
X = 1(t)
0 < t < T ⇒ Y (t) = 0
t ≥ T Y (t) = 1 (t)

Hàm số truyền phức:
Khi ta đưa vào đầu vào tín hiệu điều hòa:

Hàm số truyền:
